用于区域测绘、监测和现场传感的自主机器人
探索机器人技术的未来: ARAMMIS 项目

我们正在与苏黎世联邦理工学院的机器人系统实验室合作开展一个名为 ARAMMIS 的项目--用于区域测绘、监测和现场传感的自主机器人。我们的重点是将先进的气体传感有效载荷集成到轮式机器人中。我们的目标很明确:深入研究自主机器人的世界,提高它们利用我们的传感器绘制气体地图的能力,并在不危及人类生命的情况下提供有关恶劣环境的宝贵实时信息。
将质谱仪集成到机器人中
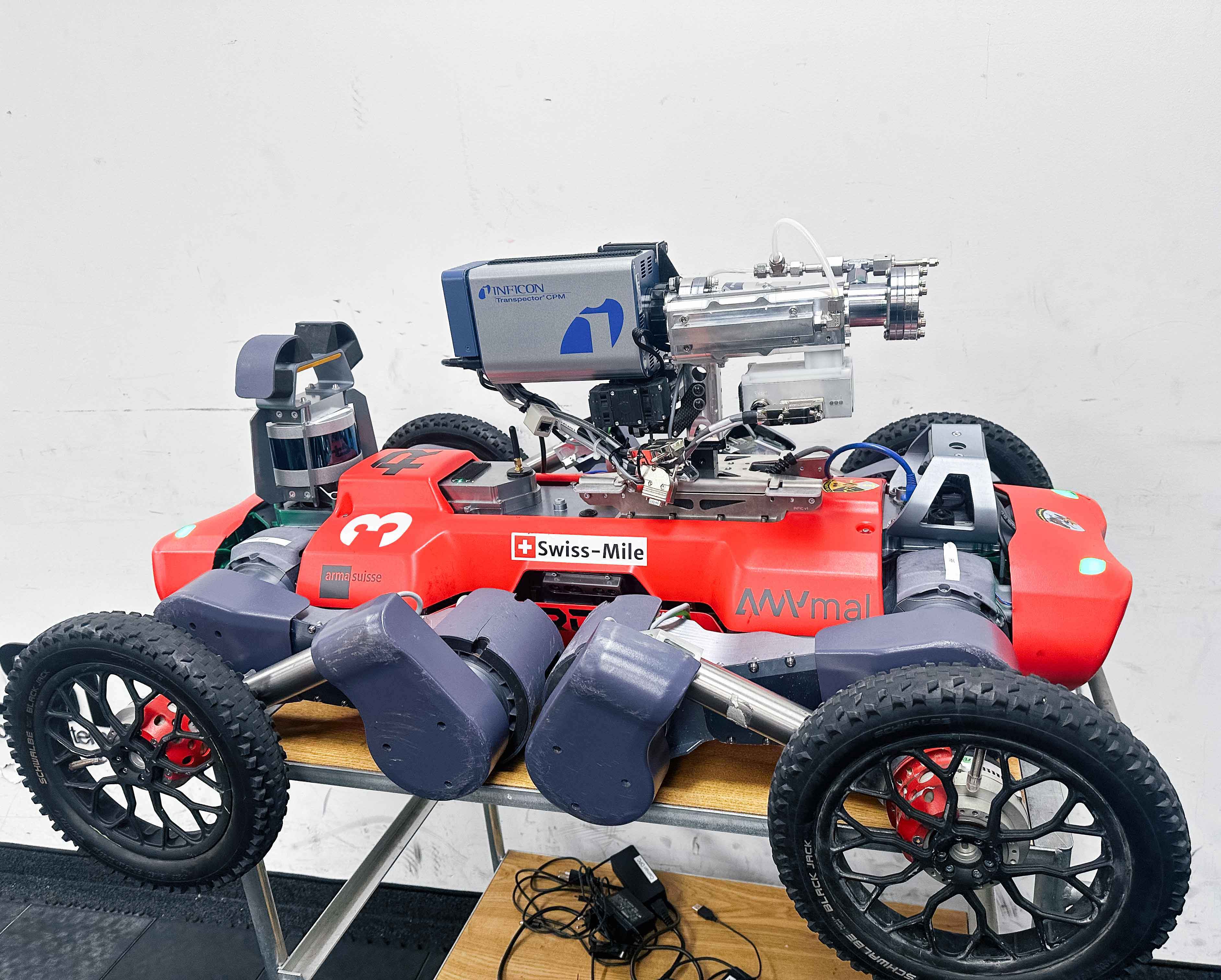
我们在 ARAMMIS 项目中实现了一个重要的里程碑--成功地将我们的质谱仪 Transpector® MPH 与四足轮式机器人集成在一起,为机器人提供原位气体传感检测和气体浓度绘图功能。 机器人和质谱仪最初是独立运行的,缺乏通信。下一个挑战是创建一个完全集成的系统,使机器人和质谱仪能够无缝通信。



机器人与质谱仪之间的通信
为了解决通信问题,我们开发了 PUMA(用于质量分析的 Python 工具)。该算法有助于机器人计算机与质谱仪之间的通信。然后,ETH 机器人系统实验室的工程师就可以将数据样本输入机器人的操作系统,该系统是基于机器人操作系统(ROS)框架构建的。这项成就是我们前进道路上的一个重要里程碑,它使我们更接近一个完全同步和自主的系统。目前,我们正在努力实现气体浓度的实时可视化,并将集成系统部署到实地任务中。

更轻、更小的质谱仪
我们认识到需要一种更灵活的解决方案,因此我们接受了挑战,为我们的商用质谱仪系统设计更轻、更小的版本。我们的目标是设计出体积更小的紧凑型质谱仪。经过不懈努力和反复修改,我们最终确定了两个版本:一个是基于商用 Transpector® CPM 和 Transpector APX 系统的现场便携式系统,但专为现场部署应用和自主操作而设计;另一个是更轻的版本,最初专为无人机和无人飞行器 (UAV) 应用而设计,因为它使用了坚固的微型涡轮泵、更轻的铝制真空室和更小的粗抽泵。我们已经对便携式系统进行了改造,为包括现场演示在内的全面测试奠定了基础。
展望未来: 超越边界的机器人技术
在前进的道路上,我们的愿景不仅仅局限于地面机器人。我们的目标是将相同的有效载荷舱用于无人机上的机器人应用。向空中平台的扩展为我们技术的多功能性增添了一个新的维度,有望在各个领域实现开创性的可能性。我们期待着未来激动人心的发展,并将继续致力于自主系统的研究。


