Autonomous Robots for Area Mapping, Monitoring and In-situ Sensing
Exploring the Future of Robotics: ARAMMIS Project

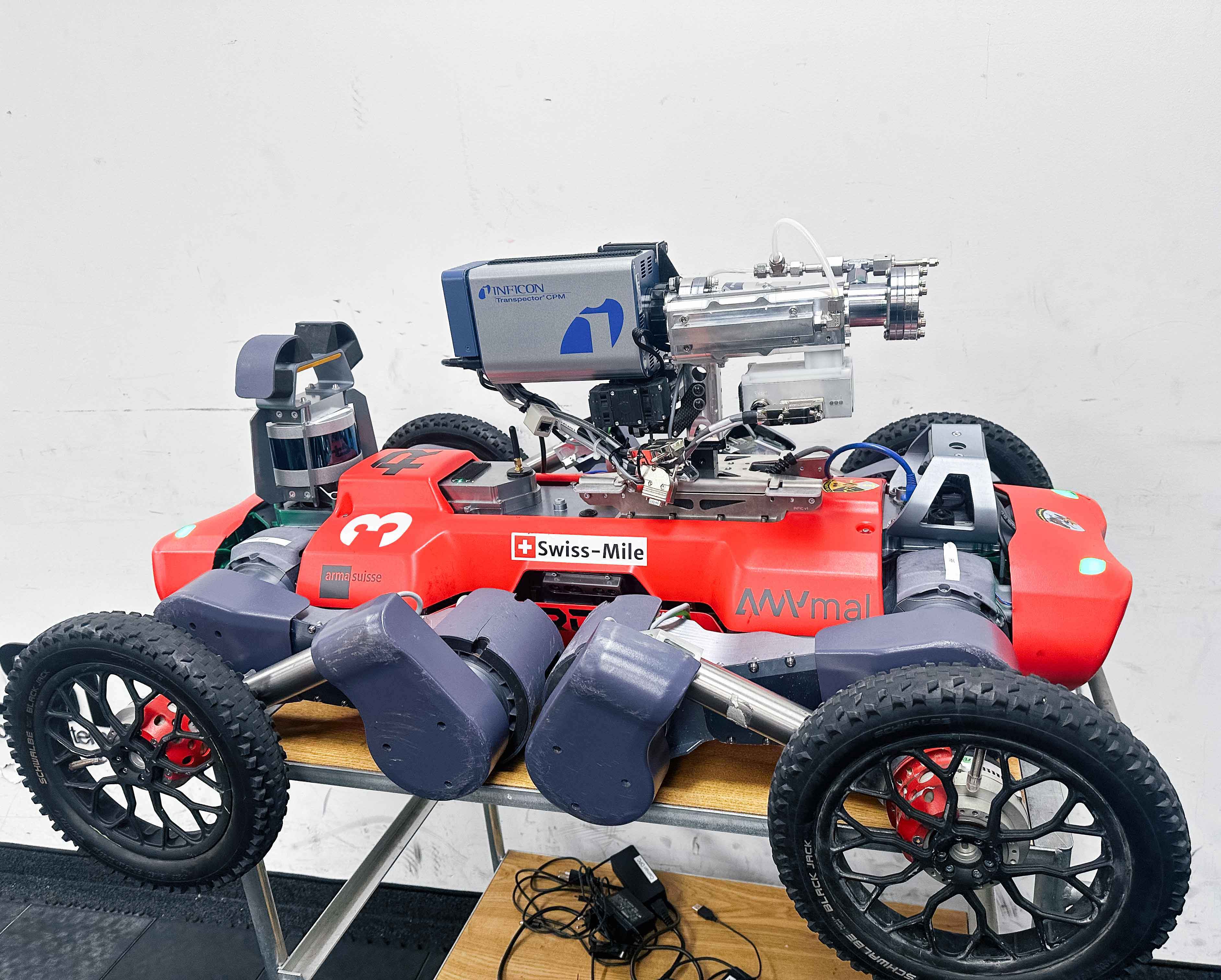
In collaboration with ETH Zurich's Robotic Systems Lab, we are working on a project named ARAMMIS – Autonomous Robots for Area Mapping, Monitoring, and In-situ Sensing. Our focus is to integrate our advanced gas sensing payloads into the wheeled-legged robot. The objective is clear: to delve into the world of autonomous robots, improving their capabilities to map gases with our sensors and provide valuable real-time information on a harsh environment without risking human lives.
Integration of the mass spectrometer into the robot
We achieved a big milestone in the ARAMMIS project – the successful integration of our mass spectrometer, Transpector® MPH, with the quadrupedal wheeled-legged robot to provide in-situ gas sensing detection and gas concentration mapping capabilities to the robots The robot and the mass spectrometer first operated independently, lacking communication. The next challenge achieved was the creation of a fully integrated system where the robot and the mass spectrometer could communicate seamlessly.



Communication between the robot and our mass spectrometer
To address the communication gap, we developed PUMA (Python Utility for Mass Analysis). This implemented algorithm facilitates communication between the robot's computer and our mass spectrometer. The engineers at the ETH Robotic Systems Lab can then input the data samples into the robots' operating system, which is constructed upon the Robot Operating System (ROS) framework. This achievement represents a major milestone on our journey, bringing us closer to a fully synchronized and autonomous system. We are now working on the live visualization of gas concentrations and the deployment of the integrated system into field missions.

Lighter and Smaller Mass Spectrometer
Recognizing the need for a more agile solution, we took on the challenge of creating lighter and smaller versions of our commercial mass spectrometer systems. Our goal was to design a compact mass spectrometer with a smaller footprint. After rigorous efforts and iterations, we have finalized two versions. The first is a field portable system based on our commercial Transpector® CPM and Transpector APX systems, but designed for field deployable applications and autonomous operation. The second one is a lighter version, initially designed for drone and unoccupied aerial vehicle (UAV) applications since it uses a robust miniature turbo pump, a lighter aluminum vacuum chamber and a smaller roughing pump. We already implemented the modifications to our portable systems which set the stage for comprehensive testing including field demonstrations.
Looking Ahead: Robotics Beyond Boundaries
As we move forward, our vision extends beyond ground-based robots. We aim to utilize the same payload bay for robotic applications on drones. This expansion into aerial platforms adds a new dimension to the versatility of our technology, promising pioneering possibilities in various domains. We look forward to the exciting developments that lie ahead as we continue to work on autonomous systems.
Interested in Collaborating with us?
Let us know if you are looking for a solution in a difficult and challenging environment, or if you want to collaborate in any of our projects.
Read more about our other research projects

Overview on research projects with partners like NASA and ETH Zurich on future technology. We strive to advance innovation and push technological boundaries.

A Collaboration with the University of Rhode Island

As experts in gas sensing and vacuum measurements in many industries including semiconductor, energy and security, our teams are always looking for the “what’s next” in innovation.