エリアマッピング、モニタリング、現場センシングのための自律型ロボット
ロボティクスの未来を探る ARAMMISプロジェクト

チューリッヒ工科大学のロボットシステム研究所と共同で、ARAMMIS(Autonomous Robots for Area Mapping, Monitoring, and In-situ Sensing)というプロジェクトに取り組んでいます。私たちの焦点は、先進的なガス検知ペイロードを車輪付き脚ロボットに統合することです。目的は明確で、自律型ロボットの世界に踏み込み、私たちのセンサーでガスをマッピングする能力を向上させ、人命を危険にさらすことなく、過酷な環境に関する貴重なリアルタイム情報を提供することです。
質量分析計のロボットへの組み込み
ARAMMISプロジェクトにおいて、私たちは大きなマイルストーンを達成しました。それは、質量分析計Transpector® MPHと四足歩行車輪型ロボットの統合に成功し、ロボットにその場でのガス検知検出とガス濃度マッピング機能を提供することです。次に達成された課題は、ロボットと質量分析計がシームレスに通信できる完全に統合されたシステムの構築でした。



ロボットと質量分析計との通信
この通信ギャップを解決するために、私たちはPUMA(Python Utility for Mass Analysis)を開発しました。この実装されたアルゴリズムは、ロボットのコンピュータと私たちの質量分析計との間の通信を容易にします。そして、ETHロボットシステム研究所のエンジニアは、ROS(Robot Operating System)フレームワークに基づいて構築されたロボットのオペレーティングシステムにデータサンプルを入力することができます。この成果は、完全に同期化された自律システムに近づくという、私たちの旅における大きなマイルストーンです。私たちは現在、ガス濃度のライブ・ビジュアライゼーションと、統合システムのフィールド・ミッションへの展開に取り組んでいます。

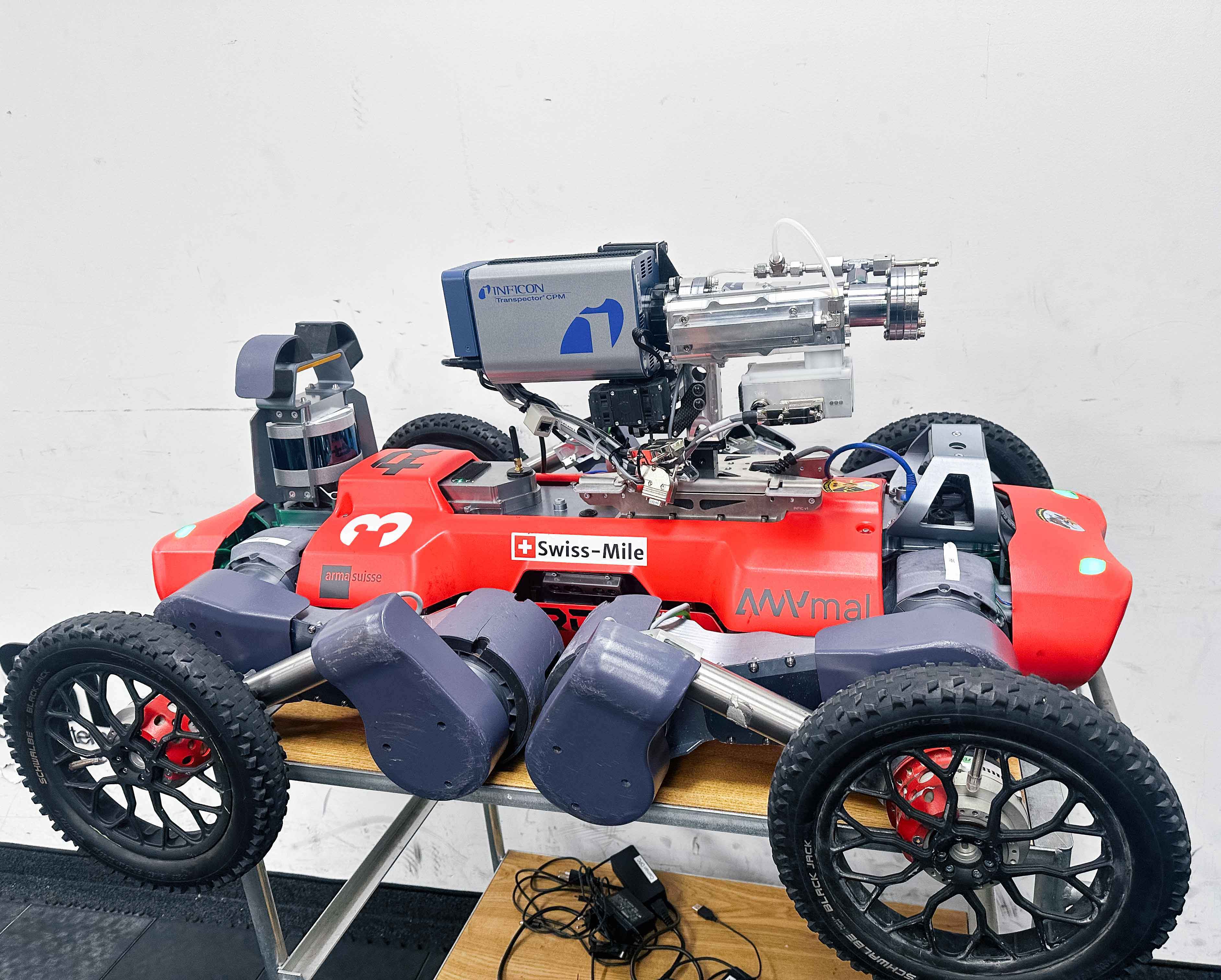
軽量・小型の質量分析計
より俊敏なソリューションの必要性を認識した私たちは、市販の質量分析システムの軽量化・小型化に挑戦しました。私たちの目標は、設置面積の小さいコンパクトな質量分析計を設計することでした。厳格な努力と反復を経て、私たちは最終的に2つのバージョンを完成させました。それは、私たちの商用Transpector® CPMおよびTranspector APXシステムをベースとしながらも、現場展開可能なアプリケーションと自律操作用に設計されたフィールドポータブルシステムと、堅牢な小型ターボポンプ、軽量なアルミニウム製真空チャンバー、および小型のラフィングポンプを使用しているため、当初はドローンや無人航空機(UAV)アプリケーション用に設計された軽量バージョンです。私たちはすでにポータブル・システムに改良を加え、フィールド・デモンストレーションを含む包括的なテストの舞台を整えました。
先を見据えて 境界を超えるロボティクス
今後、私たちのビジョンは地上のロボットにとどまりません。同じペイロード・ベイをドローンのロボット・アプリケーションに利用することを目指しています。この空中プラットフォームへの拡張は、私たちの技術の汎用性に新たな次元を加え、さまざまな領域での先駆的な可能性を約束します。私たちは、この先に待ち受けるエキサイティングな展開を楽しみにし、自律型システムの開発に取り組み続けます。


