지역 매핑, 모니터링 및 현장 감지를 위한 자율 로봇
로봇공학의 미래 탐구: 아람미스 프로젝트

저희는 취리히 연방공과대학교의 로봇 시스템 연구소와 협력하여 지역 매핑, 모니터링 및 현장 센싱을 위한 자율 로봇 프로젝트인 아람미스를 진행하고 있습니다. 이 프로젝트는 첨단 가스 감지 페이로드를 바퀴 달린 로봇에 통합하는 데 초점을 맞추고 있습니다. 목표는 분명합니다. 자율 로봇의 세계를 탐구하여 센서로 가스를 매핑하고 사람의 생명을 위협하지 않으면서 열악한 환경에 대한 귀중한 실시간 정보를 제공하는 기능을 개선하는 것입니다.
로봇에 질량 분석기 통합
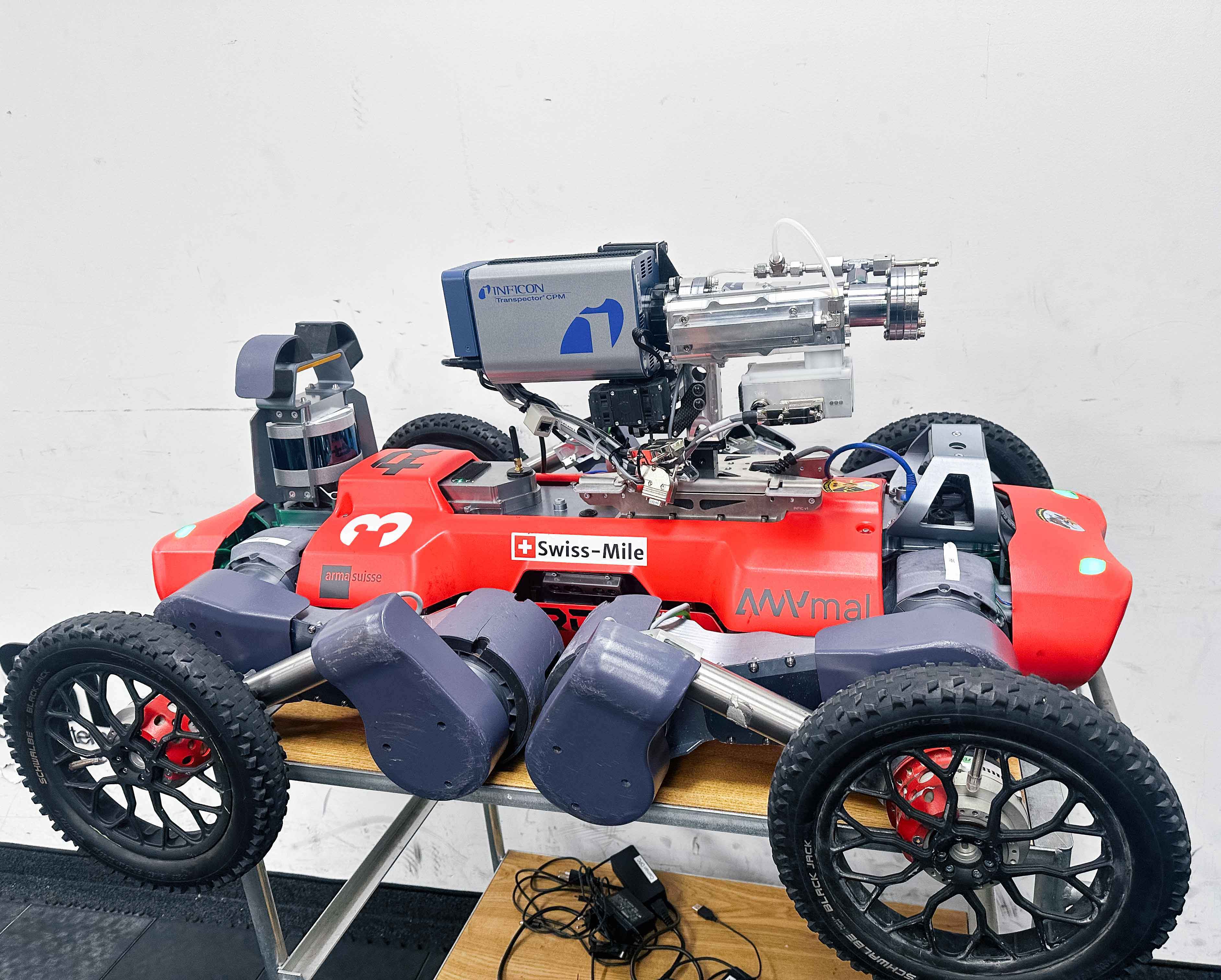
질량 분석기 Transpector® MPH 를 4족 보행 로봇과 성공적으로 통합하여 로봇에 현장 가스 감지 감지 및 가스 농도 매핑 기능을 제공한 것은 아람미스 프로젝트에서 큰 이정표가 되었습니다. 처음에는 로봇과 질량 분석기가 통신 없이 독립적으로 작동했지만, 이후에는 로봇과 질량 분석기가 완벽하게 통합되었습니다. 다음 과제는 로봇과 질량 분석기가 원활하게 통신할 수 있는 완전히 통합된 시스템을 만드는 것이었습니다.



로봇과 질량 분석기 간의 통신
이러한 통신 격차를 해소하기 위해 우리는 PUMA(질량 분석을 위한 Python 유틸리티)를 개발했습니다. 이 구현된 알고리즘은 로봇의 컴퓨터와 질량 분석기 간의 통신을 용이하게 합니다. 그런 다음 ETH 로봇 시스템 연구실의 엔지니어들은 데이터 샘플을 로봇 운영 체제(ROS) 프레임워크에 구축된 로봇의 운영 체제에 입력할 수 있습니다. 이 성과는 완전히 동기화되고 자율적인 시스템에 더 가까이 다가가는 중요한 이정표가 될 것입니다. 현재 가스 농도를 실시간으로 시각화하고 통합 시스템을 현장 임무에 배치하는 작업을 진행 중입니다.

더 가볍고 작아진 질량 분석기
보다 민첩한 솔루션의 필요성을 인식한 당사는 더 가볍고 작은 버전의 상용 질량 분석기 시스템을 개발하는 데 도전했습니다. 우리의 목표는 더 작은 설치 공간을 가진 소형 질량 분석기를 설계하는 것이었습니다. 엄격한 노력과 반복 끝에 두 가지 버전을 완성했습니다. 상업용 Transpector® CPM 및 Transpector APX 시스템을 기반으로 하지만 현장에 배치할 수 있고 자율적으로 작동하도록 설계된 현장 휴대용 시스템과 견고한 소형 터보 펌프, 더 가벼운 알루미늄 진공 챔버 및 더 작은 황삭 펌프를 사용하여 드론 및 무인 항공기(UAV) 어플리케이션용으로 처음 설계된 더 가벼운 버전이 바로 그것입니다. 우리는 이미 휴대용 시스템을 수정하여 현장 데모를 포함한 포괄적인 테스트의 기반을 마련했습니다.
미래를 내다보다: 경계를 넘어선 로봇 공학
앞으로의 비전은 지상 기반 로봇을 넘어서는 것입니다. 드론의 로봇 어플리케이션에도 동일한 페이로드 베이를 활용하는 것을 목표로 하고 있습니다. 항공 플랫폼으로의 확장은 우리 기술의 다양성에 새로운 차원을 더하여 다양한 영역에서 선구적인 가능성을 약속합니다. 앞으로의 흥미로운 발전을 기대하며 자율 시스템에 대한 연구를 계속할 것입니다.
다른 연구 프로젝트에 대해 자세히 알아보기

Overview on research projects with partners like NASA and ETH Zurich on future technology. We strive to advance innovation and push technological boundaries.

로드아일랜드 대학교와의 협업

반도체, 에너지, 보안 등 다양한 산업 분야의 가스 감지 및 진공 측정 전문가인 엔드레스하우저 팀은 항상 혁신의 '다음 단계'를 모색하고 있습니다.